


Humanoid robots solve one problem extremely well. They fit into an infrastructure built for us. There is very little required to make them fit into the past. Whether they fit into the future of industrial automation is another question.
I have never been to a factory or shop where humanoid robots, as a matter of daily routine, walk the walkways and do the work. Nor have I seen caninoid robots patrolling between car frames or anywhere else (like a nice soft couch in the boss’ office—you know dogs). However, well-publicized pilot programs, with ample video ops, have put these images into our minds’ eyes in the past couple of years.
I’m not against humanoids. I do want people to think twice about adding any of them to their factory or shop.
In a shop environment, they are wasteful, expensive and consume power resources like a 1978 Buick I once owned. They have other problems too, mainly involving the future, and they might hamper creatively designing out problems, or designing in new capabilities because they’re stuck in our body universe.
As it turns out, human mimicry is compatibility, not optimality.
Almost all shops have automation, and often that means they have an arm robot or perhaps even several of these. We are not an industry whose main concern is palletizing the way it is in consumer package goods. However, some fabricators are concerned with that topic, and in fact have robots doing the bulk of the work. These are arm robots, not humanoids, and definitely not caninoids. In machine tending, it’s the same story. It’s the same story in almost any fabricating shop application.
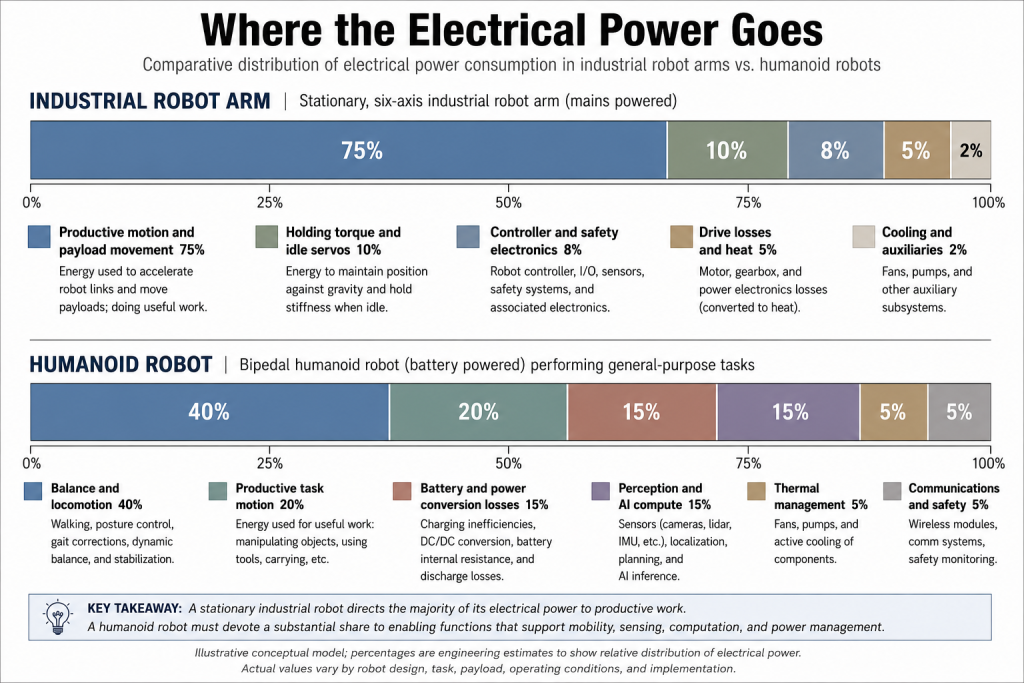
Humanoid robots and arm robots use power very differently (see Figure 1.) While referencing International Federation of Robotics (IFR) reports, Fraunhofer Institute, IEEE, the Automation Society, and a number of robotics vendors, I was able to put together some estimates.
The electric chasm
First, let’s consider the main difference between the two types of robots. The robot arm can be dormant without using power. It is very efficient: 75% of its power consumption goes toward productive motion and payload movement. Ten percent of the energy is used to hold torque and idle servos. Controller and safety electronics cost 8% of the electricity, drive losses and heat another 5%, and cooling and auxiliaries account for two percent.
Now let’s move on to humanoids, specifically bipeds that use batteries and perform general tasks around the shop. The picture is significantly different. Just to accommodate its mobility—balance and ambulation—takes 40% of its battery power. The humanoid constantly fights physics and dynamic balance is expensive in what is called “a continuously falling machine.” On this last point, a humanoid must continuously:
- Measure the center of gravity;
- Adjust ankle torque;
- Correct sway;
- Predict slip;
- Absorb disturbances; and
- Stabilize its upper-body motion.
Even standing still, it is still consuming energy. Battery and power conversion losses account for 15% of its power use—add another 10% for thermal management (because it moves) and communications and safety (because it moves). In all, just having a moving robot means you’ve spent 65% of your power budget on enabling functions rather than work functions. (Be advised, none of these percentages are measured with a micrometer, but you can see the wide gaps between the humanoid robot and the arm robot.)
Walking is energetically expensive, and if it’s carrying something, the humanoid is being taxed to its limit. Think about it: it has to lift and arrest body mass at every step, accelerlate, decelerate limbs to move about. None of this happens with arm robots. (You might observe that the arm robot has no requirement to move, and we will address a case for that in the July Fifth Wave Monthly newsletter.)
The hidden tax in humanoids is the battery (or batteries, which plural case is a good idea because they last only an hour or two between charges or swaps). Batteries are full of bad side effects:
- Charge/discharge inefficiencies
- Heat generation
- Capacity degradation
- Idle drain
- High-current losses
- Replacement cost cycles
- A swap or recharge program that allows humanoids to work a shift
An arm robot avoids most of these headaches.
Now, consider maintenance. Industrial arms are made out of hard plastics and metal. They’re extremely rugged, mature, they have predictable wear, long MTBF numbers, and they often run for decades. Weight is a minor issue, and therefore there is no problem employing strong materials for its construction.
Think of all the actuators (they have more than 20 degrees of freedom!) that are part of a humanoid robot. Add to that, gearboxes, sensors, plus wear and tear on feet and ankles, and shock loading from walking, and you have lifetime employment for maintenance engineers. We haven’t even talked about the humanoid robot’s shell, which must be lightweight to maximize battery time.
The deep economic insight I have for you is this: Industrial arm robots optimize throughput per joule. Humanoids optimize adaptability per joule. There is nothing wrong with adaptability, in fact that is a major asset of the humanoid platform. However, the adaptability comes at the price of raw energy efficiency.
Some of you might be thinking that adaptability trumps everything. Ironically, the fixed automation (arm) allows creativity at the complete process level. For example, a humanoid can twist or push controls that were ergonomically made for humans. But if some outside-the-box rerigging of a manufacturing process calls for something to start at the ceiling and move down a wall to take advantage of gravity, you can attach a robot arm. The humanoid can’t really be considered without injecting even more inefficiency.
Let me put that into a statement: Humanoids are more general as long as we don’t change the setup. In other words, if a process changes so much that a humanoid is not adaptable enough to do the work, that’s one mark off the generality score. The humanoid nature is to have a human reach envelope, with human joint architecture, human balance requirements, human tool-use geometry, and human floor navigation. Humanoids excel at fitting into human infrastructure.
Suppose a process engineer reviews a department’s throughput, and the answer is to make a major process vertical instead of horizontal, with loading at the top. Do we want to have the humanoid robot climb five stories? Or should we install an arm robot at the top? Money is almost no object because the new process will save $1.2 million per year.
While humanoids fit into our infrastructure, what happens here? The fixed arm-type robot is free to abandon human assumptions entirely. Stepping away from anthropocentric thinking will be heresy in the future if we bring on the many thousands of humanoid robots we keep expecting.
Something else to consider: Human mimicry is compatibility, not optimality. While they are adaptable inside the envelope of what humans do, they carry the same architectural baggage we do. And if they are established, process engineers will not be allowed to think too far outside the box. Companies will miss potentially huge gains or savings.
Meanwhile a fixed robot can exploit gravity feed, inclined conveyors, rotation, spring energy, and momentum transfer of all sorts.
Ask any owner of a fab business and that person will tell you that the shop itself is a redesignable machine. There are owners whose businesses started the low-ceilinged, straight-shot linear fashion. But in this new exciting age of manufacturing, we are no longer linear, we are staged and bifurcated. The smart owners changed their shop design to accommodate the new ways.
Once you allow redesign of the environment, the humanoid advantage shrinks dramatically. Humanoids preserve human workflows, arm robots rewrite workflows around physics.
I often compare humanoid robots to “cone-top” beer cans of the 1930s and 1940s (Figure 2). It was an easier transition to use a bottle opener; people were used to that. After a while, brewers, distributors and retailers were sick of cans you couldn’t stack or even ship easily, and they went to the flat-top can we all know today. Cone-tops were a transitional technology, nothing more, nothing less. And transitional technologies often win first because they minimize ecosystem disruption, not because they are optimal. They can use the same world we use.

A parallel with the cone-top cans is that they felt familiar and trustworthy, the same way humanoids do today. “Now that’s what a robot should look like,” you sometimes hear at expos when people describe one of the new humanoids. The emotional link is powerful. However, industrial history can be cruel, and the final dominant systems usually look very unlike human behavior. (Examples of surprising new dominant systems are container shipping, server farms, automated warehouses, and semiconductor fabs.)
One last point: humanoids will continue to improve as long as vendors see a market for them. It might not be an industrial application, it might be domestic or caretaking or medical. The need to perform more accurately and to make gains in some of its weak areas will mean a rise in complexity, and thus price, much like the safety and convenience features in automobiles have increased their complexity, obsoleted the so-called “shade tree mechanic” and sent prices skyward. It is the “complexity ratchet.”
Something evolves to a continuously more optimal fit, but it brings on more complexity, not simplification. Also, you could look at the situation as the tenon fitting better and better, and one day the mortise changes.
But they can excel
Humanoids are not junk, they are just not as good a manufacturing fit as the arm-type robot, which allows processes to evolve beyond human architectures. Humanoids have their strengths, however, and probably a better solution when:
- Infrastructure is necessarily frozen;
- Maintenance is unpredictable;
- Tasks vary widely;
- Tasks occur in different parts of the shop floor;
- Humans and robots share spaces (but still…cobots);
- Labor shortages dominate in areas of flexibility; and
- Shops are brownfield instead of greenfield.
Market pressure rarely rewards simplicity. Look at automobiles, particularly the safety systems of automobiles. We had a used 1961 T-Bird when I was a kid. There were seat belts which were never used, power windows but not power steering nor power brakes. My 1978 Buick had both power steering and brakes, but no anti-lock brakes, and no air bags. Later those came standard in cars that had many subsystems and price hikes.
Humanoids may follow the same trajectory but perhaps even more aggressively than cars, because they operate in unstructured environments, around humans, and they have physical autonomy. What a combination to almost guarantee increasing system complexity. Yet, if arm robots become somewhat specialized, they may move toward more simplicity.
Somewhat paradoxically, specialized arm robots could become more elegant over time, while humanoids become more computationally dense and infrastructurally dependent, it might be “all about the platform.”
Humanoids will not be an across-the-board failure. They will exhibit useful and worthwhile properties in healthcare, logistics, domestic assistance, and other fields where a humanish form and a nurturing dictionary are important. However, it’s clear that manufacturing has always rewarded designs that optimize physics rather than imitate biology. Before investing, it’s not enough to ask “Can it do the job?” but rather, “Is this the most efficient way to redesign the process?” That may be the more important question.